


By Philip Butterworth-Hayes
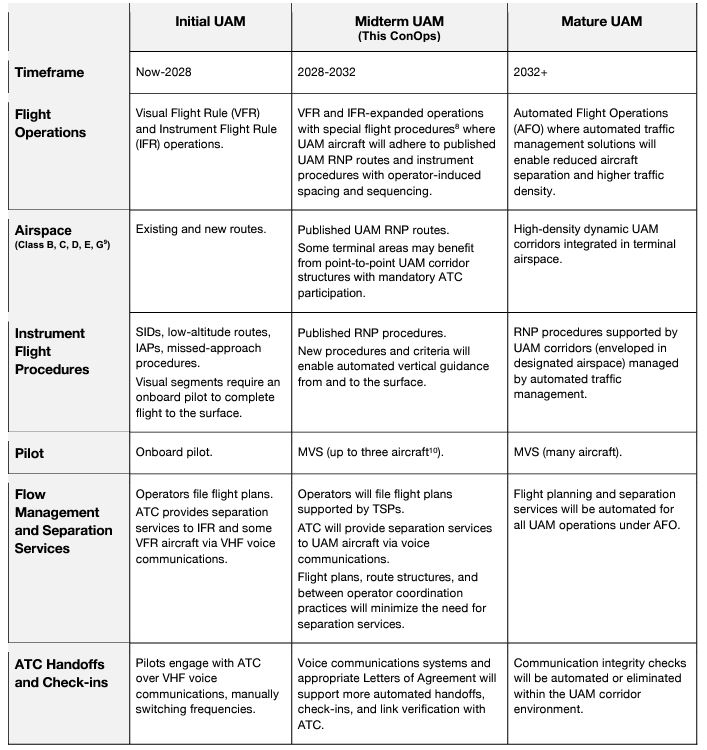
Wisk Aero has issued an update to its previously released Concept of Operations (ConOps) for Uncrewed Urban Air Mobility (UAM), jointly developed with The Boeing Company. The document provides a roadmap for the introduction of autonomous eVTOL systems in the USA and in the process highlights some of the major technical, operational and regulatory challenges of introducing autonomy into the US national airspace system, especially in handing over control to a human when crises occur.
As Wisk’s eVTOL will be an autonomous aircraft one of the key concepts discussed within the ConOps is the role of supervisor in the fleet operations centre (FOC). By 2035 fully autonomous eVTOL operations under all circumstances will be commonplace, according to many AAM roadmaps, but in the initial years regulators and the flying public will be need to be reassured that a human can take back control of the aircraft in exceptional circumstances – such as a bid strike, for example.
“Uncrewed UAM aircraft will be managed by supervisors located in the FOCs,” says Wisk’s new document. “Each aircraft supervisor will be responsible for monitoring assigned aircraft but will not function as a remote pilot, as the piloting functions will be automated (onboard and in the FOCs). Also, each aircraft supervisor will manage multiple aircraft and be referred to as a multi-vehicle supervisor (MVS). The following key principles will apply to MVSs:
- Supervisory in nature: Under the supervision of an MVS, the avionics suite onboard UAM aircraft automation will execute the flight.
- Authority over automation: MVSs will be able to override flight intent of the UAM aircraft unless an aircraft has lost its C2 link.
“Both before and during flight, MVSs will be responsible for verifying flight plans and their associated trajectories to avoid hazardous conditions (e.g., traffic, weather, terrain, obstacles, etc.). MVSs will be able to modify aircraft flight path based on the options in the route database if they determine that the aircraft will encounter a hazard on the current route…..”
The high-level document does not make fully clear the type and severity of incidents which will require the MVS to modify the aircraft’s flight path and does not make clear how much of the aircraft’s autonomous control systems, beyond modifying the flight path, will thereby be passed to the FOC. The aircraft’s autonomous system itself has been designed to cope with a full range of operational and dynamic hazards and react accordingly – so what additional information or control functions will an MVS need? How exceptional will an MVS intervention be? According to the ConOps:
“UAM aircraft will be equipped to detect operational hazards (e.g., traffic, weather, terrain, obstacles, etc.), and execute avoidance maneuvers if appropriate. Supervisory oversight and intervention will be possible but will not be required (my italics-editor). UAM aircraft will be operated in accordance with applicable collision avoidance, remain well clear, and right-of-way frameworks and regulations.”
Under the current ConOps it will not be a simple dialogue between the MVS and the aircraft when control needs to be passed. There will be three in this marriage, the third being a potential Third-Party Service Provider. Again, according to the Wisk document:
“Third-Party Service Provider solutions that will replace key functions currently performed by an onboard pilot will be provided by a third-party service provider (TSP), an entity separate from the UAM operators and ATC,” says the CONOPs…. “a TSP may provide a database of Notices to Airmen (NOTAM) but might also provide optimized flight paths that consider the limitations imposed by those NOTAMs…. TSP services will gain maturity and gradually take on increased airspace responsibilities – including strategic deconfliction and separation management functions. These increased safety-of-life approved capabilities will initially operate in “shadow-mode” and be assistive during the midterm phase (this ConOps), providing supplemental services to the UAM operators, and transition into “responsible-mode” during the mature UAM phase once operational efficiency, level of safety, and public acceptance exist.”
This suggests that both the MVS and TSP will be able to modify the autonomous aircraft’s flight path – but how these roles will evolve is also unclear.
The role of the TSP is not included in the ConOps of the world’s other major autonomous eVTOL air vehicle, the EHang 216. From the high level documentation available, EHang’s approach is to give the FOC a simpler, centralised control role (https://www.ehang.com/app/en/EHang%20White%20Paper%20on%20Urban%20Air%20Mobility%20Systems.pdf), allowing the FOC to take over control of the vehicle, via a high-speed and ultra-long-distance transmission wireless network, in case of an incident and to land it at the nearest landing site.
“Unlike conventional transportation modes like cars or airplanes, a UAM system requires a centralized remote command-and-control platform to perform multiple tasks autonomously,” according to an EHang white paper on the subject. “With the help of computer programs and cluster management techniques, the platform is able to control the flights of thousands of UAM vehicles simultaneously. Specific flight tasks are coded, registered, executed and monitored to ensure safety, efficiency and quality. Thus, complex traffic situations become manageable.”
With EHang autonomous AAV operations due to start within the next few months it will important for regulators, standards authorities and industry to understand just how divergent these approaches to ceding control of the autonomous aircraft to humans in the FOC really are, especially for initial operations.
And time is short; Wisk is aiming to have mature, autonomous eVTOL operations in the US national airspace within nine years
The latest version of the Wisk ConOps can be downloaded here.
For more information
Wisk Lays Foundation for Uncrewed Urban Air Mobility with Updated Concept of Operations